Sensor de Temperatura
O presente documento tem como objetivo detalhar o sensor de temperatura utilizado no projeto Cannabot. Foi planejado a utilização do sensor de temperatura para monitorar a temperatura de diversas regiões do reboiler em operação, permitindo que possa ver em qual região a temperatura está menor, indicando que pode haver tubos entupidos na região.
O sensor de temperatura utilizado é o modelo BME/BMP280, um sensor que mede a temperatura, pressão e umidade do ambiente. O sensor é conectado ao Raspberry Pi 4 por 4 jumpers, e realizamos a interface com ele usando a biblioteca de python RPi.bme280 v0.2.4.
Imagem do Sensor
Fonte:Imagem retirada do artigo de utilização do sensor do randomnerdtutorials
Montagem do sensor
O sensor de temperatura é conectado ao Raspberry Pi 4 por 4 jumpers, formando a seguinte conexão:
| Sensor BME280 | Raspberry Pi 4 |
|---|---|
| VIN | 3.3V |
| GND | GND |
| SCL | GPIO 3 |
| SDA | GPIO 2 |
Segue abaixo a imagem da conexão do sensor de temperatura com o Raspberry Pi 4:
Conexão do sensor com a placa
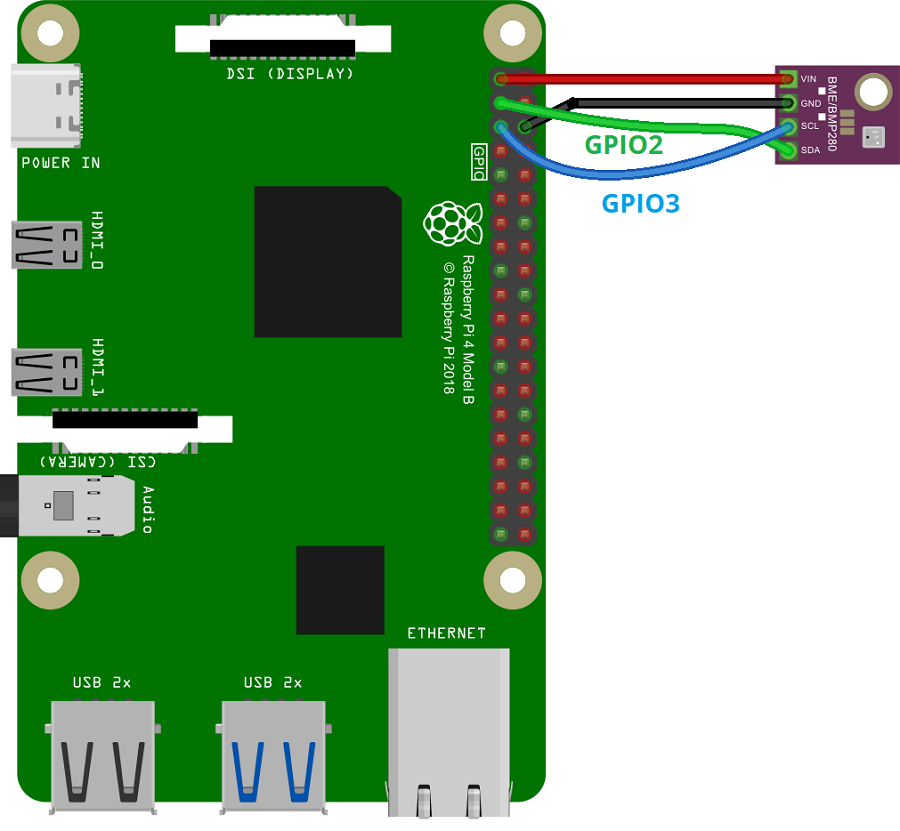
Fonte:Imagem retirada do artigo de utilização do sensor do randomnerdtutorials
Após montar a conexão, é necessário instalar a biblioteca RPi.bme280 v0.2.4 para realizar a leitura da temperatura, pressão e umidade do ambiente e ativar a comunicação I2C no Raspberry Pi 4. Para ativar a comunicação I2C, basta seguir o tutorial disponível no site randomnerdtutorials.
Após fazer isso basta rodar o nó de ROS que publica a temperatura lida pelo sensor ao tópico ROS /sensor_data, detalhado na próxima seção.
Nó de ROS
Para a integração do sensor de temperatura com o ROS, foi criado um nó que publica a temperatura lida pelo sensor ao tópico ROS /sensor_data. O nó foi desenvolvido em Python e utiliza a biblioteca RPi.bme280 v0.2.4 para realizar a leitura da temperatura (como mencionado anteriormente) além da biblioteca smbus v0.3.4 para a interface com a pinagem do RPi.
O nó é responsável por realizar a leitura da temperatura, umidade e pressão a cada 2 segundos e publicar o valor lido no tópico /sensor_data. O valor é publicado em um objeto do tipo String, porem nada mais e do que um JSON "stringified".
Estrutura do JSON
{
"temperature_celsius": <float>,
"temperature_fahrenheit": <float>,
"pressure": <float>,
"humidity": <float>
}
Onde:
temperature_celsius: Temperatura em graus Celsius.temperature_fahrenheit: Temperatura em graus Fahrenheit.pressure: Pressão atmosférica.humidity: Umidade relativa do ar.
Segue abaixo o código do nó de ROS que publica a temperatura, pressão e umidade do ambiente:
import json
import bme280
import rclpy
import smbus2
from rclpy.node import Node
from std_msgs.msg import String
class BME280Publisher(Node):
def __init__(self):
super().__init__('bme280_publisher') # type: ignore
self.publisher_ = self.create_publisher(String, '/sensor_data', 10)
self.timer = self.create_timer(2.0, self.timer_callback)
# BME280 sensor address (default address)
self.address = 0x76
# Initialize I2C bus
self.bus = smbus2.SMBus(1)
# Load calibration parameters
self.calibration_params = bme280.load_calibration_params(self.bus, self.address)
def celsius_to_fahrenheit(self, celsius):
return (celsius * 9/5) + 32
def timer_callback(self):
try:
# Read sensor data
data = bme280.sample(self.bus, self.address, self.calibration_params)
# Extract temperature, pressure, and humidity
temperature_celsius = data.temperature
pressure = data.pressure
humidity = data.humidity
# Convert temperature to Fahrenheit
temperature_fahrenheit = self.celsius_to_fahrenheit(temperature_celsius)
# Create the JSON message
sensor_data = {
'temperature_celsius': temperature_celsius,
'temperature_fahrenheit': temperature_fahrenheit,
'pressure': pressure,
'humidity': humidity
}
msg = String()
msg.data = json.dumps(sensor_data)
# Publish the message
self.publisher_.publish(msg)
# Log the readings
self.get_logger().info(f'Publishing: {msg.data}')
except Exception as e:
self.get_logger().error(f'An unexpected error occurred: {str(e)}')
def main(args=None):
rclpy.init(args=args)
node = BME280Publisher()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
if rclpy.ok():
rclpy.shutdown()
if __name__ == '__main__':
main()
Conexão ao Backend
Para a conexão do sensor de temperatura ao backend, o programa de websocket principal do robô, que expõe uma rota de websocket para controle e monitoramento foi ampliado, integrando mais um "subscriber" para assim publicar as informações extraídas a uma interface acessível de fora do robô. Isso pode ser conferido no código no arquivo src/package/workspacewebsocket_robot/websocket_robot/websocket_robot.py. A parte desse código relacionada ao sensor de temperatura é a seguinte:
self.create_subscription(String, '/sensor_data', self.temp_callback, 10)
def temp_callback(self, msg):
jsonified = json.loads(msg.data)
self.get_logger().info(f'Temperatura: {jsonified}')
broadcast(json.dumps({
'temperature': jsonified['temperature_celsius']
}))